| Modelinformatie: |
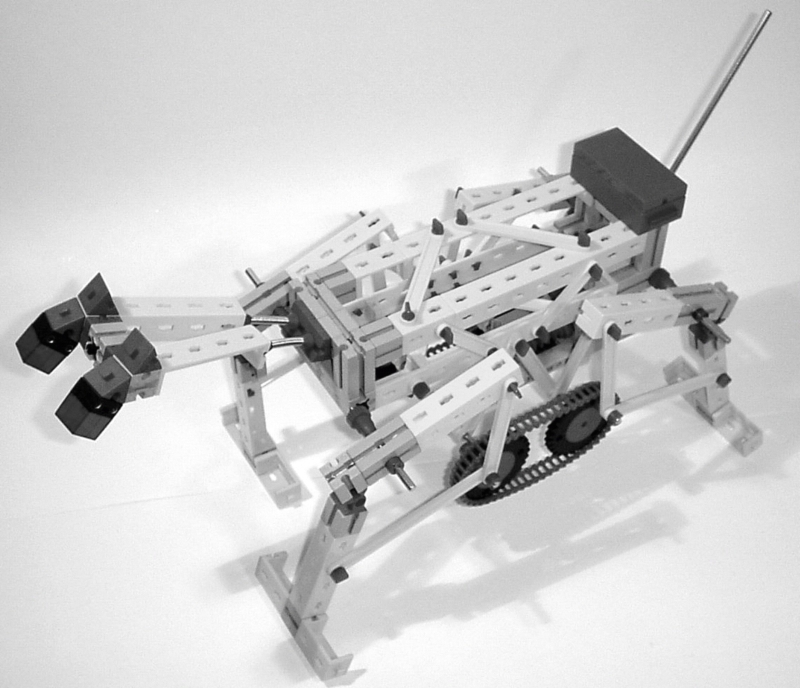
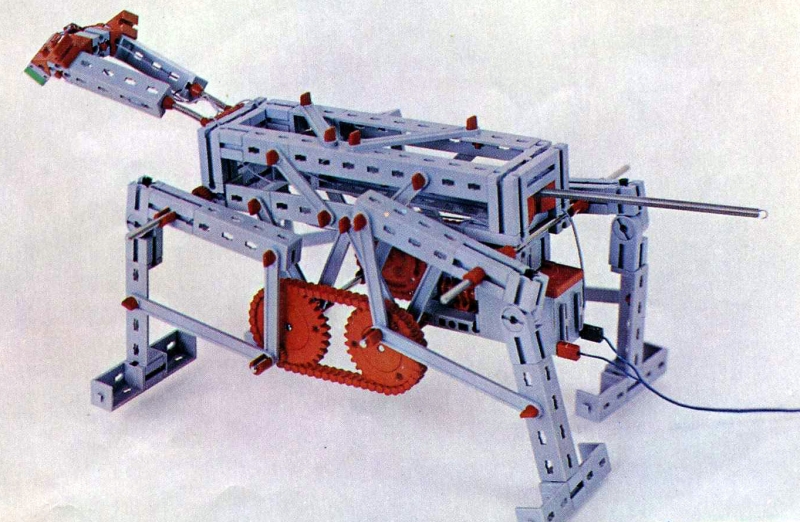
In 1993 heeft in het zomernummer van ons clubblad een kort bericht gestaan over het model “De kat” dat door Johan Lankheet was gebouwd. Johan had destijds het model nagebouwd aan de hand van een artikel dat in 1972 in het Duitse Clubblad was verschenen. De bedenker van het model was Hr. Horst Stöcker uit Bremerhaven. Lang voordat de doos ‘I’m walking’ nog moest verschijnen had Hr. Stöcker dus al een bionisch diermodel geconstrueerd. Deze kat kan op vier poten met een soepele gang voor- en achteruit lopen en zelfs kleine hindernissen nemen. Met behulp van twee veervoetkoppelingen schudt de kop van het dier terwijl het loopt en twee lampjes zorgen ervoor dat het dier je ook nog eens indringend aanstaart. |